
Vi T. Vo
Hi, my name is Vi (pronounced as Vee)! I am a 3rd-year Mechanical Engineering Ph.D. student advised by Prof. Tommaso Ranzani in the Morphable Biorobotics Lab at Boston University. My research focuses on soft robotic platforms for underwater locomotion, combining model-based control with bioinspired strategies to enable adaptive seabed navigation and exploration. This work has potential applications for inspection and sample collection on the ocean's threatened reefs. Previously, I conducted research under Prof. Daniel J. Preston in the PI Lab at Rice University.
Contact: vitvo[at]bu.edu | academic cv | Google Scholar | Linkedin
Research Areas
- Soft robotics
- Modeling and control
- Embodied and physical intelligence
- Underwater soft robotics
Research Focus
Sensorized origami-inspired soft bellow actuators as locomotive limbs
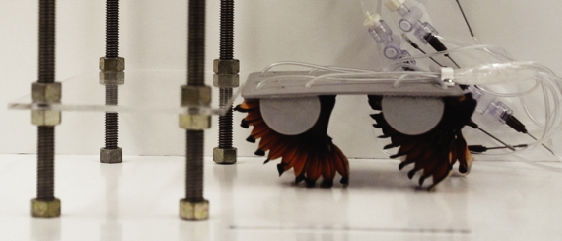 Legged locomotion in soft robotics has largely relied on tendon-driven systems or elastomeric actuators with
limited deformation range. However, origami-like soft actuators fabricated following a layer-by-layer approach offer
a distinct mechanical profile: large length changes upon pressurization, inherent collapsibility, and origami-like
reconfigurability that makes them well-suited as locomotive limbs.
These same properties, however, make them significantly harder to model and control.
Unlike elastomeric actuators, they undergo large geometric changes during
inflation, exhibit highly compliant contact behavior, and lack established modeling frameworks that can capture their
interaction with the ground.
Legged locomotion in soft robotics has largely relied on tendon-driven systems or elastomeric actuators with
limited deformation range. However, origami-like soft actuators fabricated following a layer-by-layer approach offer
a distinct mechanical profile: large length changes upon pressurization, inherent collapsibility, and origami-like
reconfigurability that makes them well-suited as locomotive limbs.
These same properties, however, make them significantly harder to model and control.
Unlike elastomeric actuators, they undergo large geometric changes during
inflation, exhibit highly compliant contact behavior, and lack established modeling frameworks that can capture their
interaction with the ground.
Related publications:
Skills:
Software: Python (VS Code, Raspberry Pi integration, motor control using Tic stepper motor controller, data acquisition for signal logging), TensorFlow (machine learning), MATLAB, C/C++ (ESP32 development), signal processing and filtering, ABAQUS (hyperelastic material modeling)
Tools: 3D printing (SLA/SLS, FDM), PCB design for optical force sensors (KiCad, SMD reflow soldering), 2D fabrication (heat press lamination, CO₂ laser cutting, UV laser micromachining), ATI force/torque sensing systems, Instron tensile testing (Young’s modulus characterization), electromagnetic (EM) tracking
Exploring physical intelligence in soft robotics

Physical intelligence in soft robotics explores how computation, sensing, and control can emerge from the physical dynamics of materials and embedded fluids, rather than relying solely on centralized digital computation. My research investigates fluidic logic as a substrate for mechanical computation, using pressure and airflow as information carriers to construct circuits that implement functions such as switching, gating, and state retention without conventional electronics. This includes the fabrication of sheet-based fluidic diodes, which bias airflow or pressure in a preferred direction and serve as fundamental building blocks for these logic architectures. In parallel, I have also contributed experimental systems used to study how pressure dynamics in soft actuators can be leveraged to understand system behavior, where temporal pressure responses reflect deformation, contact, and internal state evolution.
Related publications:
Skills:
Software: MATLAB (Data Acquisition Toolbox for pressure signal logging and digital signal control of electro-pneumatic circuits), Inkscape (design of laser-cut fabrication patterns)
Tools: 3D printing (SLA/SLS, FDM), 2D fabrication (heat press lamination, CO₂ laser cutting, vinyl cutting)
Leveraging electropermanent magnets (EPMs) for untetethered, energy-Efficient soft robotics and devices
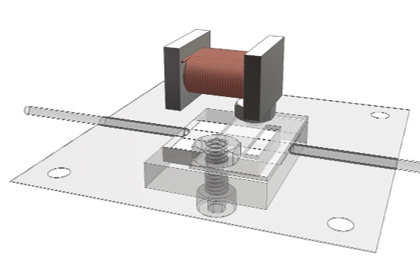
Electropermanent magnets are a class of permanent magnets whose magnetic state can be switched with a brief current pulse, requiring no continuous power to maintain. Despite this advantage, their integration into soft robotic systems remains limited. My research explores the practical implementation of EPMs across two soft robotic applications: (i) as low-profile, onboard valves that route pressurized fluid across multiple actuator channels without the bulk of traditional valve banks, and (ii) as jamming actuators that stiffen metal sheet assemblies enabling variable-stiffness structures suited for wearable and haptic devices without the pneumatic infrastructure that conventional jamming requires. Together, these two use cases demonstrate EPMs as an electronic-based control primitive for untethered soft robotic systems and devices.
Related publications:
Skills:
Software: MATLAB (Imaging Toolbox for image processing, Data Acquisition Toolbox, Frequency response analysis), Python, Arduino
Tools: 3D printing (SLA/SLS, FDM), Waterjet, PCB design for driving electropermanent magnets (KiCAD, SMD reflow soldering), 2D manufacturing (Heat press, CO2 laser cutter, UV laser micromachining)